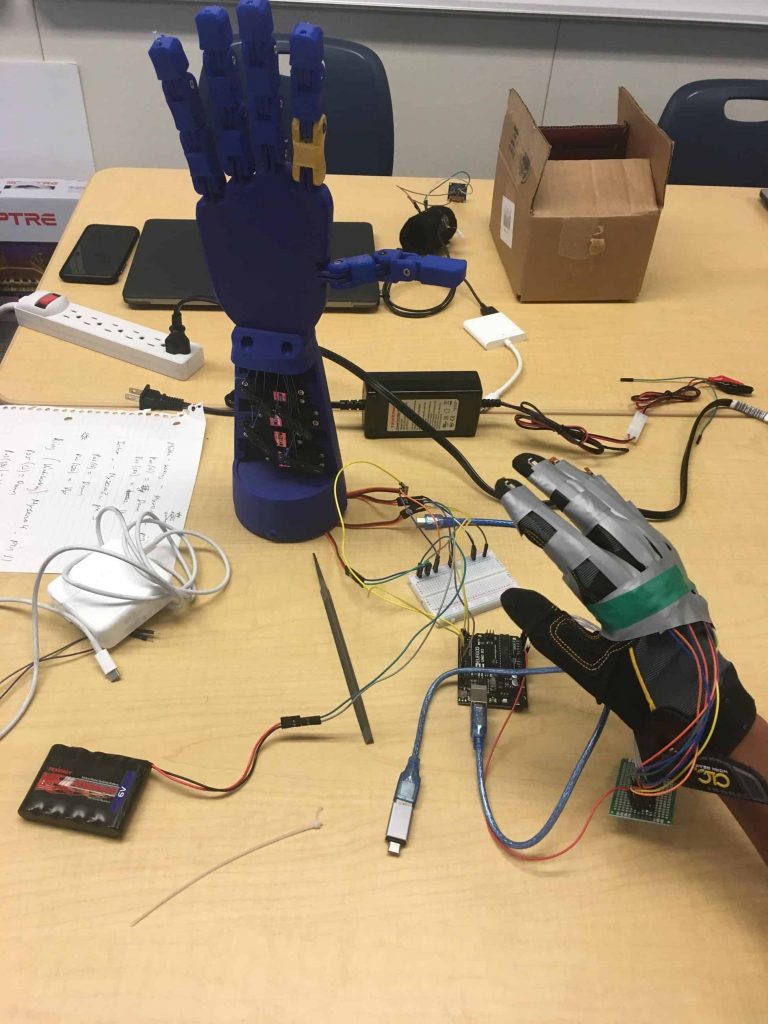
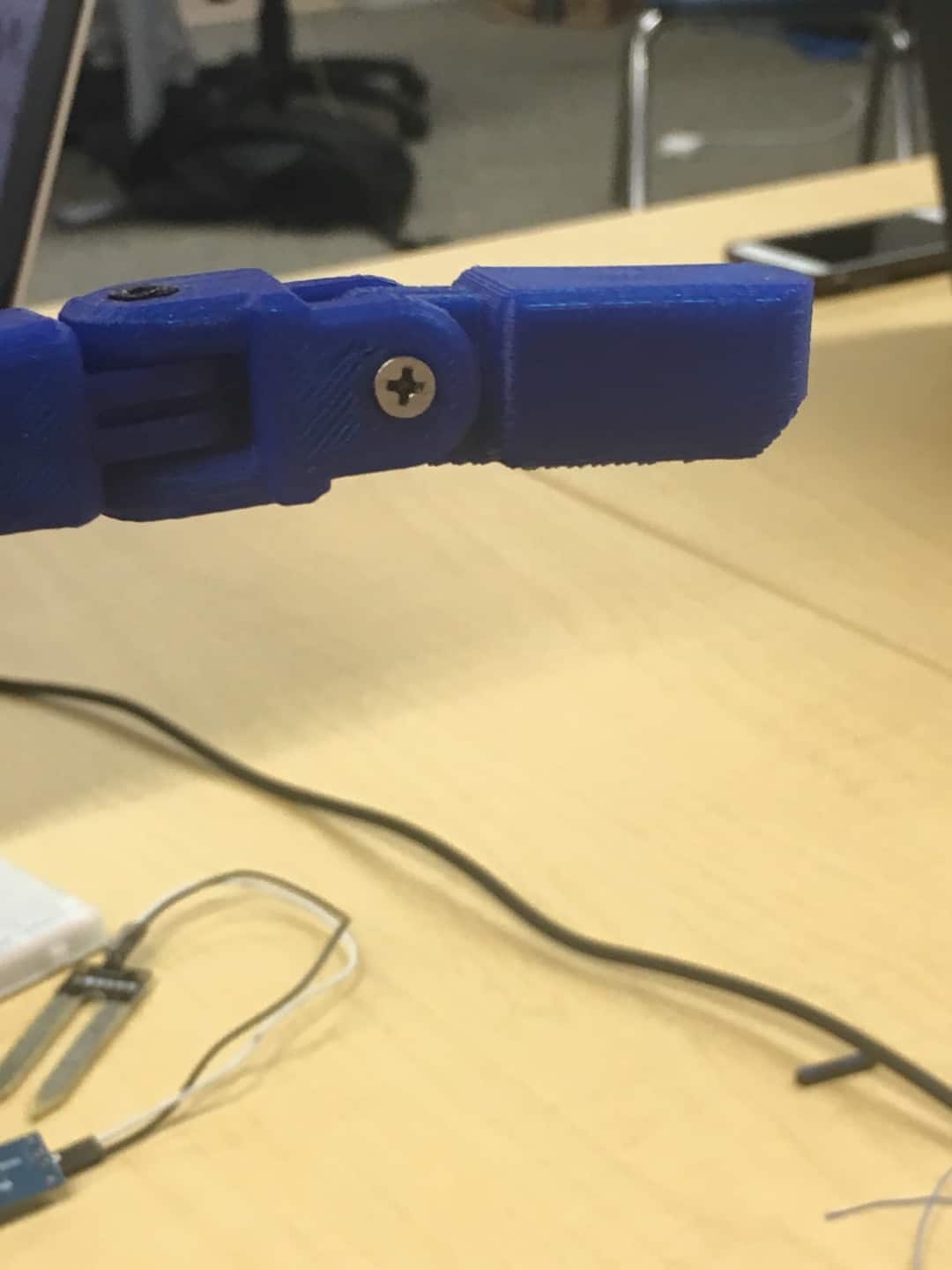
For my second milestone I decided to showcase a fully assembled 3D printed hand and base.
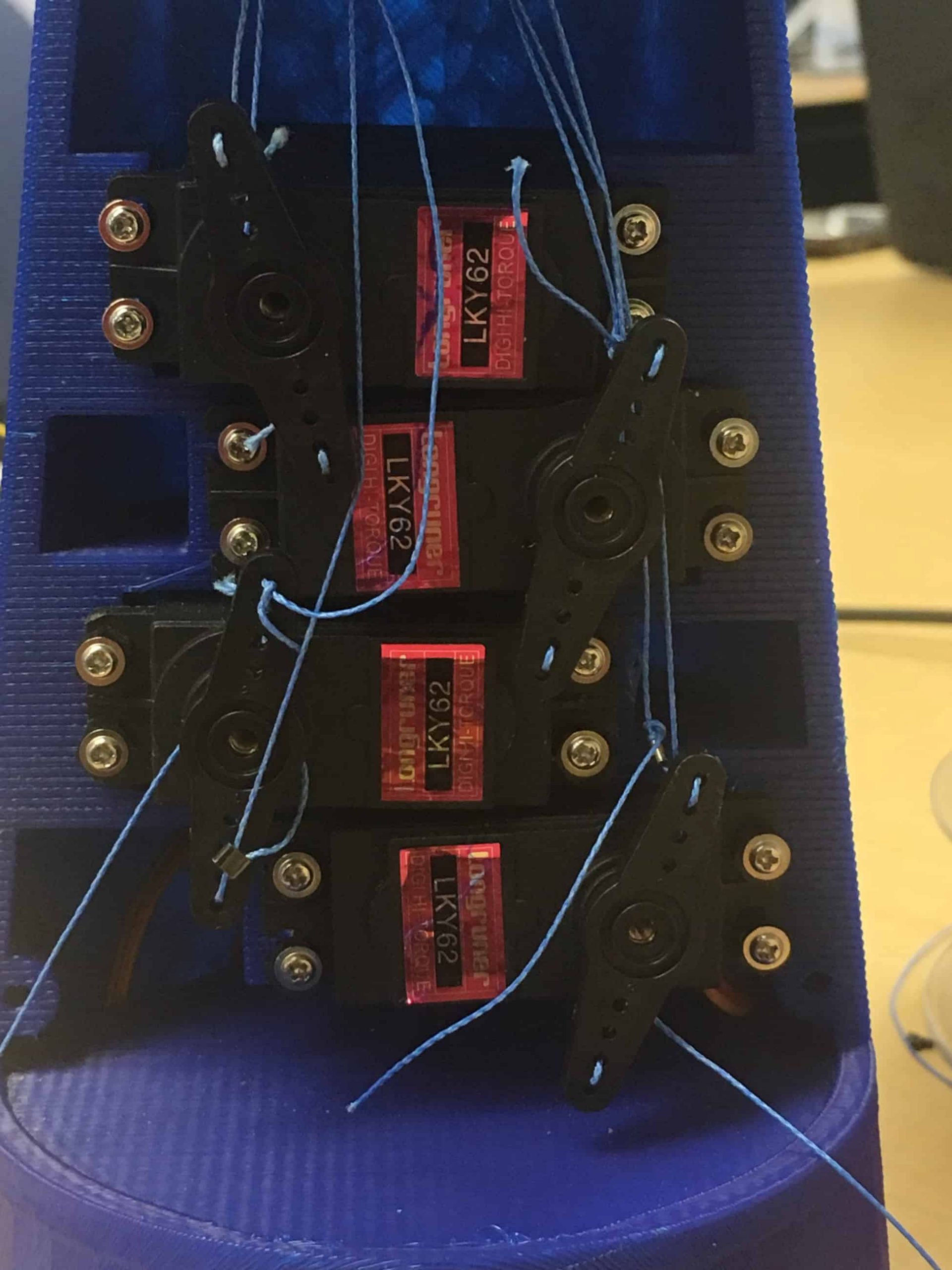
This one week build incorporated many skills other than using mechanical tools. My first step, however, was to use an impact driver(electric screwdriver) to screw in the screws into the nuts, that hold the finger in place. They were Philips-head screws that had unique threading and didn’t have any screwdriver that could match it. That is why I used an impact driver to push it with so much force that it had to fit into the nut. However, that method shreds the thread inside the screw and makes it almost impossible to unscrew. I eventually resorted to using pliers to manually rotate the screws without destroying the screw thread. My next step was to attach two string to a motor each controlling a finger. I designed it so that at any given time one of the strings is taut, while the other loose. When the finger is at its rest position, the string pulling the finger down is taut, while the string pulling the finger up is loose and vice-versa. This pulley-like system allows the finger to have a whole range of motion from its rest position to fully erect. The most tedious part of this process was definitely putting crimps through the strings to hold them in place. After a short period of use, the crimp would slip and let the strings run loose. I solved this by tying tight knots around the crimps holding it in place. Furthermore, each time I tightened a crimp, it couldn’t be undone and I had to use a new crimp each time.
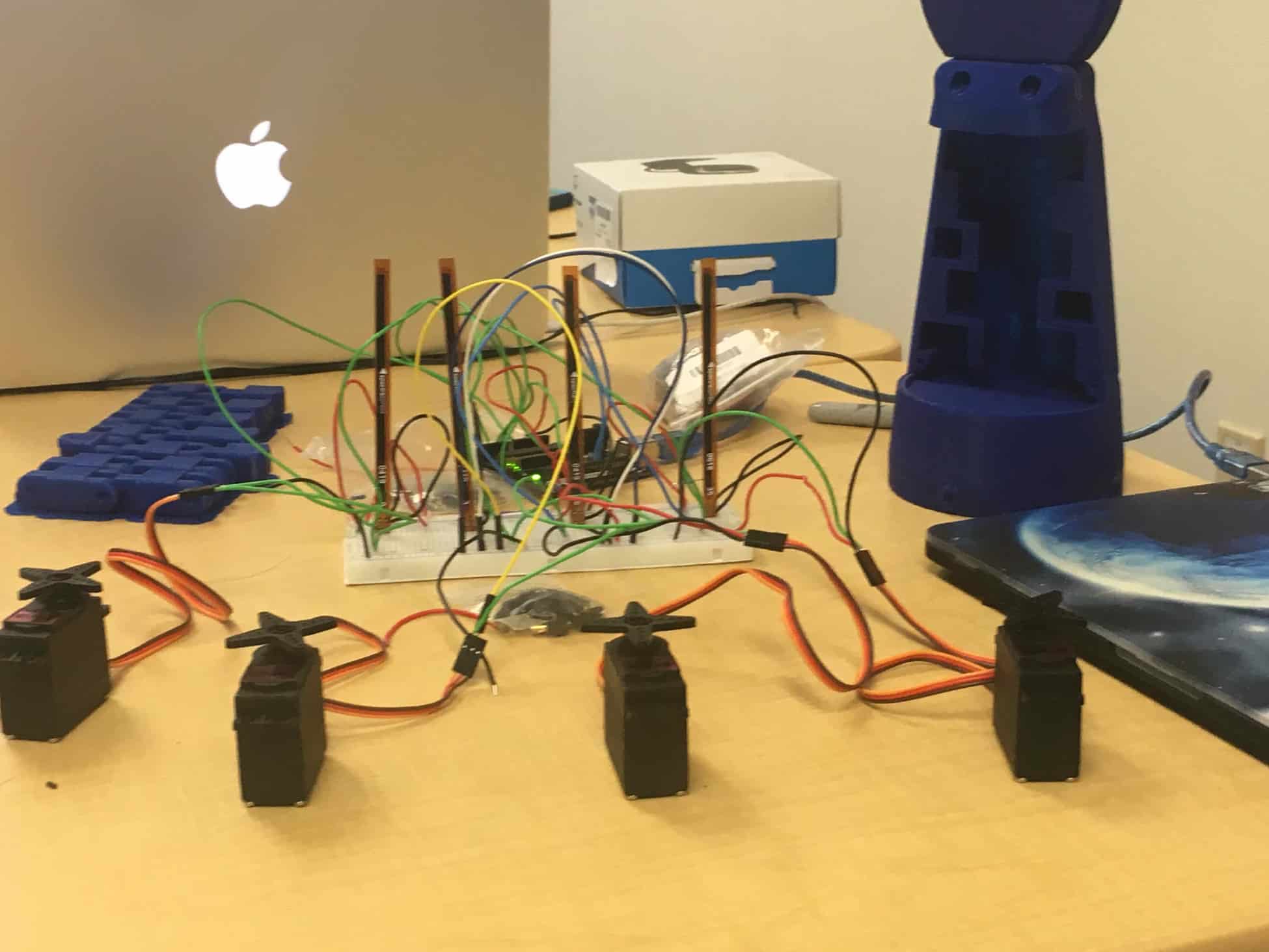
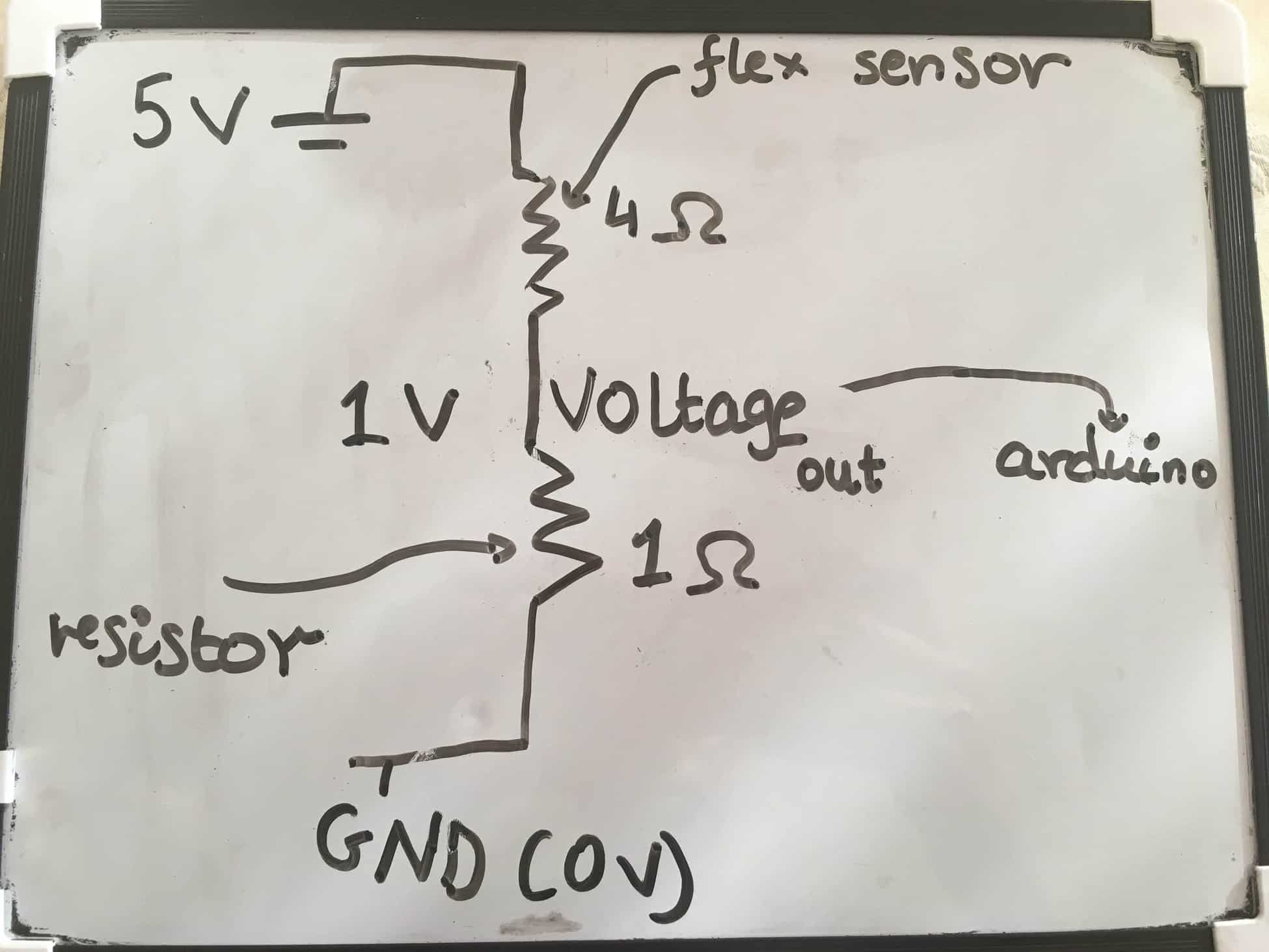
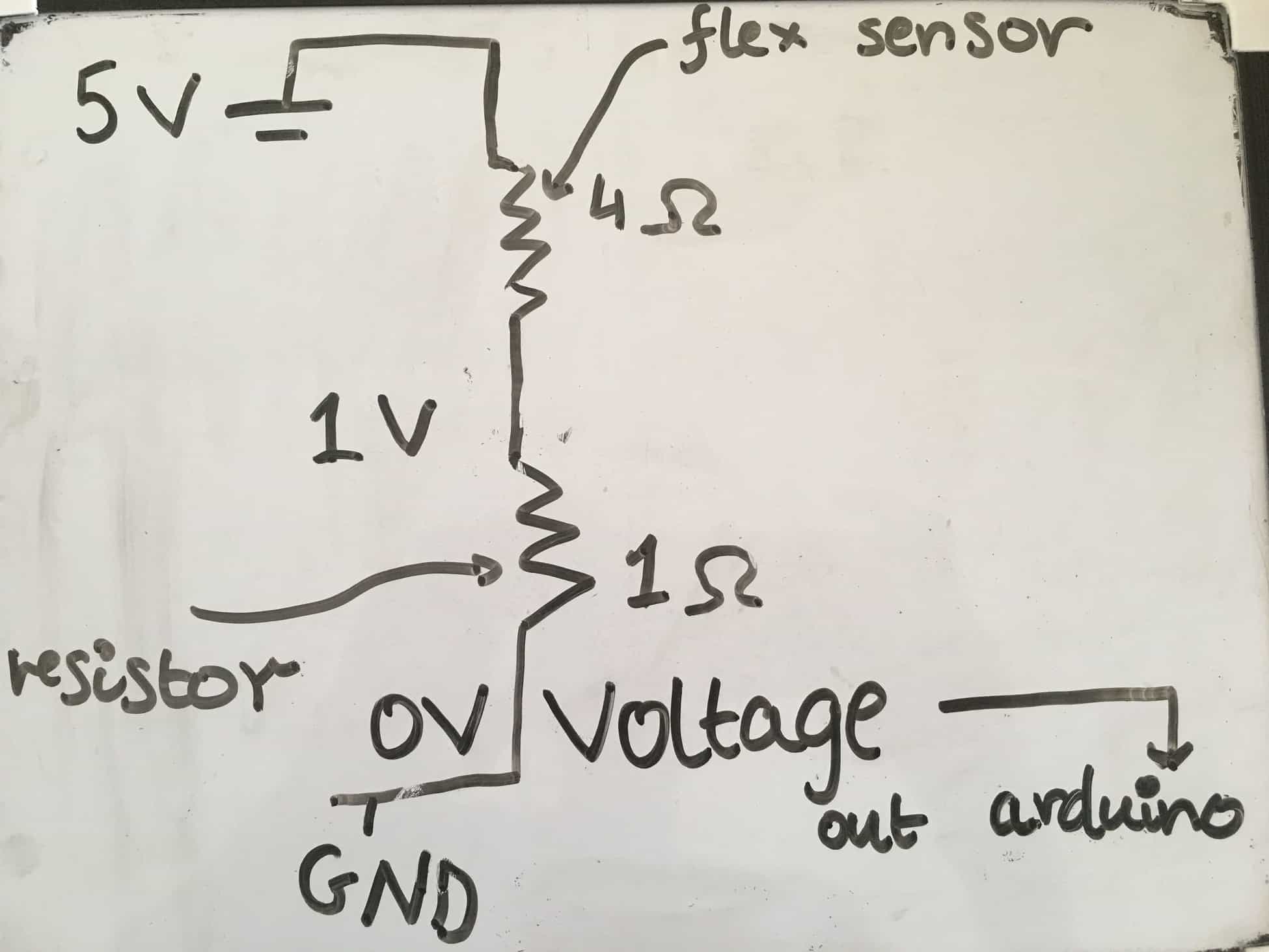
Simultaneous to the build, I transferred all the wiring for my flex sensors to a blank PCB. I had various challenges while trying to solder my electrical components. To create a connection between my ground wire, resistor, and analog wire, I had to solder across 3 joints. I struggled with bridging these joints together in an efficient and clean way. During the first few tries, my PCB would look terribly messy, since I would solder in a clumpy mountain-like fashion. At first, I tried de-soldering the clumpy connections, but I realized that I was burning my PCB since I was overusing my soldering iron. I eventually resorted to using a fresh set PCBs, wires, and resistors. After soldering my flex sensor connections, I began testing the connections of my servos. After a while of testing, my servos stopped rotating. At first, I thought it was a faulty connection, but then I realized my battery wasn’t charged. I then used a multimeter to measure the voltage passed through the servos. I found out that there was no power being passed through the servos and realized that the battery was dead.