
Self Adjusting Socket for Ratchet
When using a ratchet, it is infuriating to find different sockets to use on different bolts. Using an adjusting socket saves time an effort as people do not need to search for a specific socket.
| Engineer | School | Area of Interest | Grade |
|---|---|---|---|
|
Rohan S. |
Fremont High School |
Mechanical Engineering |
Incoming Junior |
FINAL MILESTONE
For my final milestone, I finished assembling everything and mounted all my parts together using 3D printed parts that I designed. I also configured some buttons on my PCB.
HOW IT WORKS
My first step during this milestone was designing brackets that would hold the multiple pieces of my project together. I designed one circular bracket over here which holds the ratchet onto the chuck. This L bracket over here is what holds the motor on the chuck. The 3D printed parts were not too hard to design on Solid Works but it was slightly annoying to make sure I had precise measurements so my brackets would fit well. I also had to make sure that my brackets would structurally be strong because the force would be being applied to them from the motor. After breaking about 8 brackets, I somewhat perfected the design. During this milestone, I also resoldered everything onto a new PCB to make everything neater. Additionally, I decided to add buttons so I can control when I want the jaws of the chuck to retract or enclose. To code the buttons, I created a state machine, which is essentially an organized way to write my code. There are pretty much 3 states which my motor can be in. The first state that my motor starts in is nothing moving at all. The second state is when one of the buttons is pressed and the jaws contract. The third state is the motor stops once the jaws tighten around a nut or a bolt and a current is sensed. To return to the first step the other button can be held and the jaws of the chuck will retract.
SECOND MILESTONE
My second milestone is transferring to using a smaller Arduino and motor driver, putting everything onto a PCB, switching to a larger motor, and getting a new chuck.
HOW IT WORKS
My first step during this milestone was assembling my plastic chuck that was 3D printed. After long hours of trying to fit the different pieces together by sanding and using the dremel, the chuck ended up not working. It was extremely difficult to get the 3D printed parts to move smoothly with each other. I had to vigorously file the parts for long periods of time and the majority of the parts ended up fitting but significant components that would actually make the chuck work didn’t such as the jaws. Instead, we got a metal chuck which worked really well. My next step was wiring my new arduino to a smaller motor driver on a breadboard. I also had to write new code to accommodate the new components. Luckily everything worked the first try. I then soldered all the new components onto a PCB. I finished off soldering my new motor on. I had to figure out how to attach my motor onto my new chuck, so I decided to use CAD to design a part that would work. I printed two versions of them. This is how it looks and the other one is inside this blue adapter which goes onto the motor.
FIRST MILESTONE
HOW IT WORKS
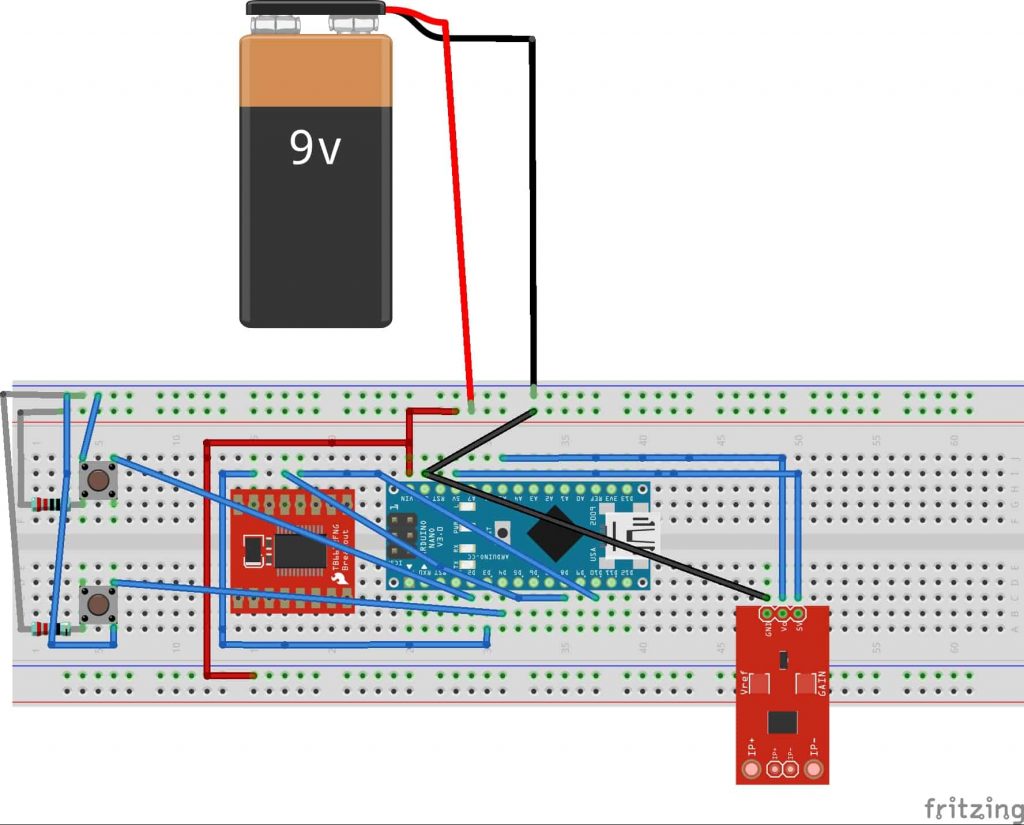
My first step was connecting my Arduino to my motor driver. I needed a motor driver because I was using a DC motor which requires a high voltage, that could not be provided by the microcontroller itself. I then connected my motor driver to the motor itself. I had to code in order to get my motor to work, so I figured out how to. I also wired my current sensor, but I had to somewhat disassemble what I had before as current flows in one path in a series circuit. I also had to code the current sensor to properly tell me my current when I was reading my serial monitor. A key part of my code is the digital write part where one of the pins is low and the other is high. This simply controls the direction that the motor spins. Another key part of my code is calculating what the current of my motor is by using serial print. I knew my reference voltage was 5 volts and it was split into 1023 equal steps, so I divided 5 by 1023 and got the raw voltage. I then subtracted the quiescent output voltage, or QOV, which is half my input. This meant my QOV was 2.5 volts. I also added a very small number to account for error. I then tested whether my serial monitor would tell me the current and it did. Challenges I faced during my first milestone were figuring out how to code as I had never coded in my life before. I also had to figure out how to measure current and I began doing this by using an ammeter. I later figured out how to incorporate the current sensor. The final challenge I faced was learning how to calculate the current. For my next milestone, I am looking forward to assembling the mechanical part of my project.
My project is making a socket that attaches on a wrench that can adjust. My first milestone is getting my motor working and incorporating my current sensor.
STARTER PROJECT
HOW IT WORKS
The Simon Says game I made consists of a Buzzer. The buzzer works with the piezo element inside of it vibrating and emitting a frequency audible to the human ear. The game also has a decoupling capacitor which is a capacitor used to decouple one part of an electrical network from another. The resistors are used to control how much current is sent out. The microcontroller is a pre-programmed computer telling the system what to do. The Simon Says game is a series circuit. From prior knowledge, I knew that if the voltage of both batteries adds up, the circuit is the series. I tested this and saw that each battery had a voltage of 1.6 and the total voltage of the circuit was 3.2. This proved that the circuit was a series.
The starter project I made is Simon Says. This is actually my second starter because my first one did not go so well as I was inexperienced in soldering. Fortunately, I can now say that I am comfortable with soldering and putting other electrical components together.
REFLECTION
Overall, I really enjoyed Bluestamp and it was a great experience. I’m really happy about how my project turned out. It is exactly what I pictured before I started and it is satisfying to see that everything worked out in the end.