RC Robot Tank
A Remote Controlled Robot Tank using an Arduino.
| Engineer | School | Area of Interest | Grade |
|---|---|---|---|
|
Jadon Lam |
Homestead High School |
Electrical Engineering and Computer Science |
Incoming Junior |
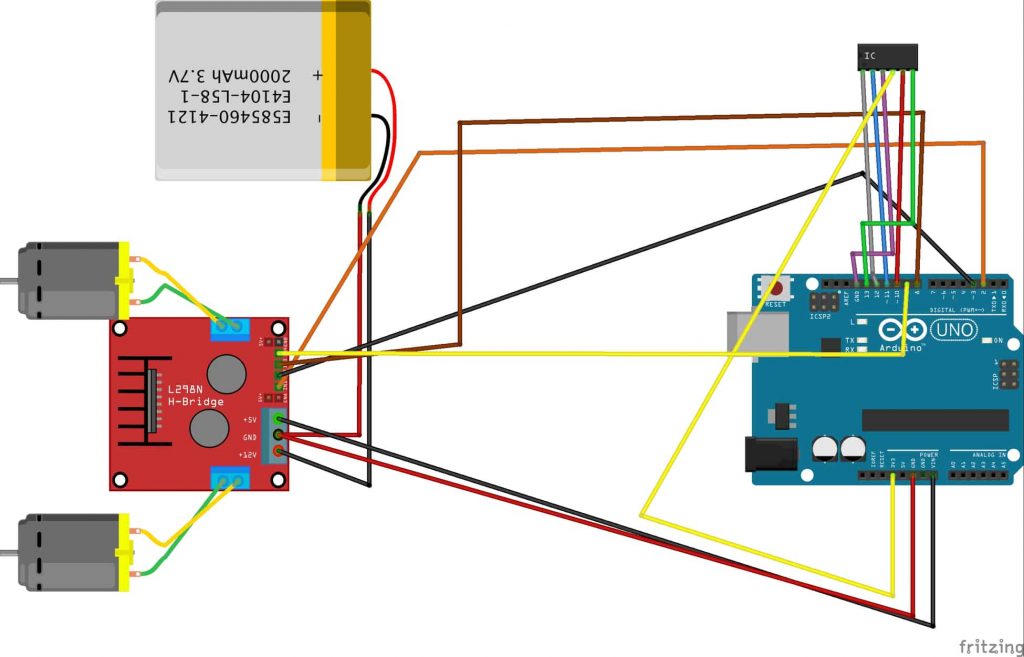
FRITZING SCHEMATIC
FINAL MILESTONE
This is my final milestone for my RC Robot Tank. I connected my Ps2 controller’s receiver to my Arduino with different pins such as the voltage and command and downloaded the Ps2X library on the Arduino IDE so the two can communicate with each other. Then, on the IDE, I used a series of if statements and methods to move the motors in different directions. A problem I faced while doing this was connecting the Ps2 controller to the Arduino. I didn’t know I had to have both the receiver and controller in the same mode for them to connect. If I had more time at Bluestamp, I would use analog pins instead of digital pins to limit the motor speed when I use the d-pad on the controller. Another future modification would be finding a more permanent place for my parts and wires because a lot of them can come loose or even add a firing cannon to fit the tank aspect of the project.
FIRST MILESTONE
This is my first milestone for my Remote Control Robot Tank. My Arduino uses PWM, Pulse Width Modulation, to control the speed of the motors. PWM lowers the average voltage sent to the motors and based on that, I can control the speed of my motors. Since the Arduino can’t supply the motors with a high enough current, it’s connected to the motor driver. The motor driver allows for a higher current flow from another power source. The motors don’t have enough torque to turn the treads, so the gearbox lowers the speed of the motors but also increases the torque, allowing the tank to move in different directions. The most challenging aspect of my first milestone was assembling the gearbox. This part was extremely sensitive to change, and I would have to take everything apart just to diagnose the problem. Sometimes I would just have to grease some gears, but other times, the problem was much larger, and I would need to use spare parts to construct it again.
USELESS MACHINE
The Useless Machine is a box that when turned on, will turn itself off with an arm. I soldered different parts like ports and an LED to a PCB Board which all connect to a motor. Once you turn the box on, the motor will start running counterclockwise until it switches the box off. Then, the LED will turn red and the motor will run clockwise until it applies pressure to a momentary button, turning everything off.
Overall Reflection
Bluestamp was a great experience which helped me learn more about the engineering process as a whole and meeting lots of other individuals sharing similar interests as mine, and the instructors were also great. They constantly pushed me to tackle problems on my own without asking for help immediately, and I felt that this helped me get more out of this program and learn more.