MPU 9250
GPS RECEIVER
POTENTIOMETER
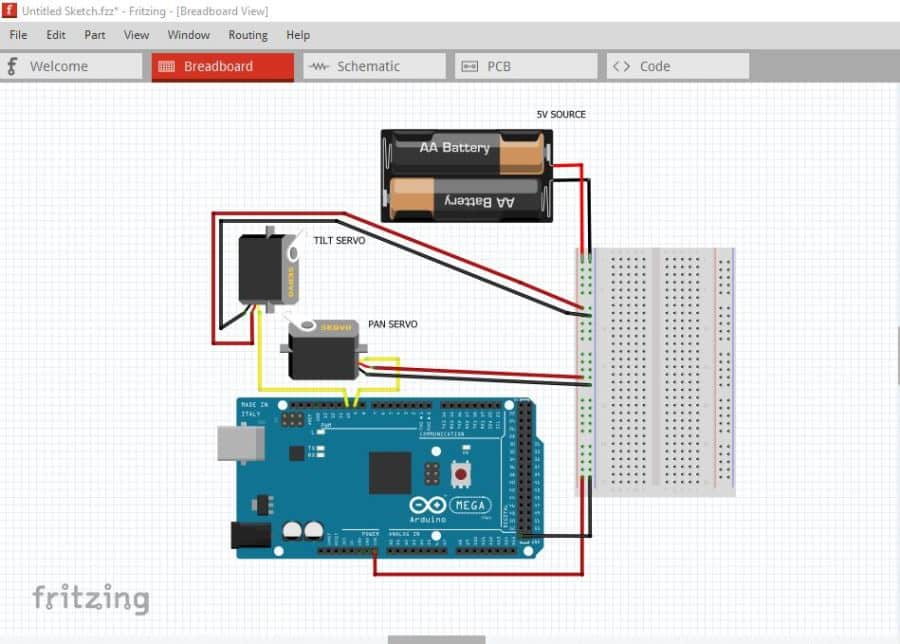
SERVO
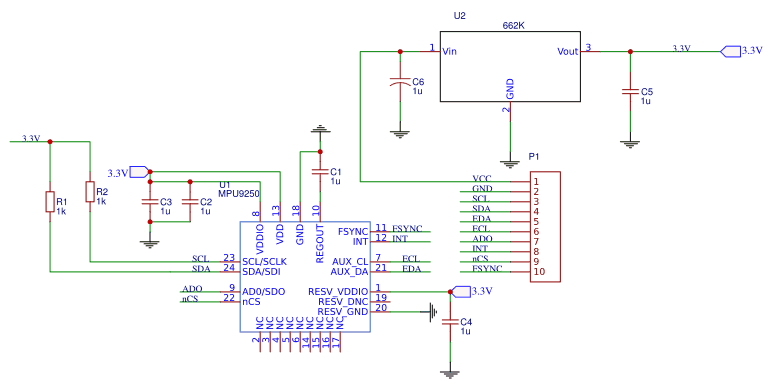
MPU 9250
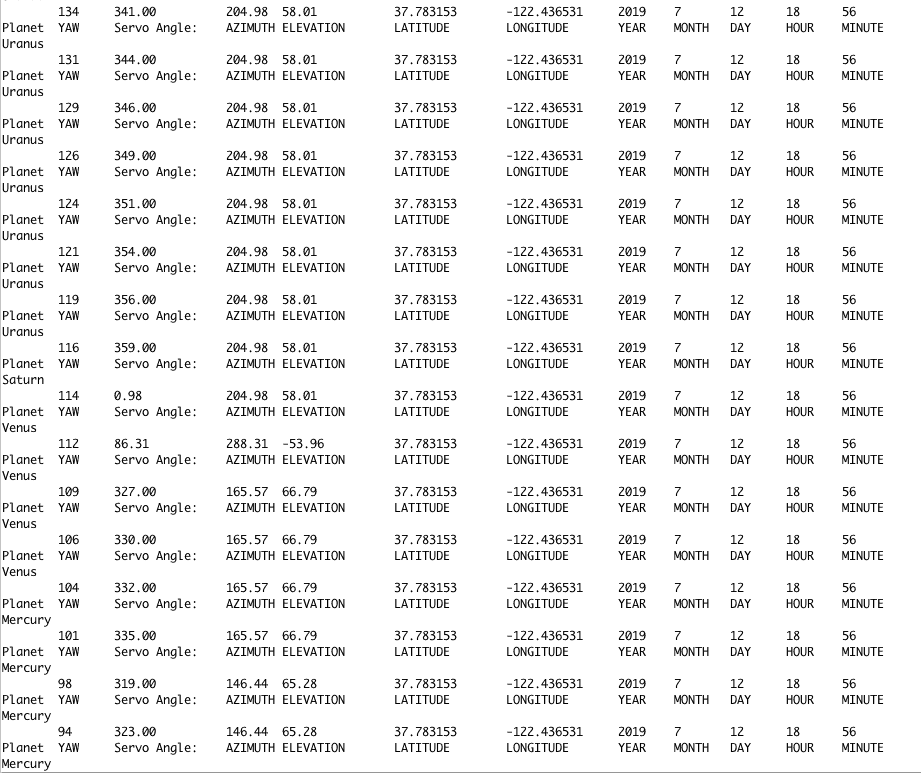
MPU can calculate motion parameters such as Linear acceleration, Angular acceleration, and the Magnetic North of the planet with a reference point on the object. MPU9250 has an accelerometer, gyroscope, and a magnetometer. The MPU has raw readings of the Euler’s angles the three angles : yaw, pitch, and roll. It measures the orientation of the object. The MPU stores the data from the sensors and the data is transmitted over I2C Serially.

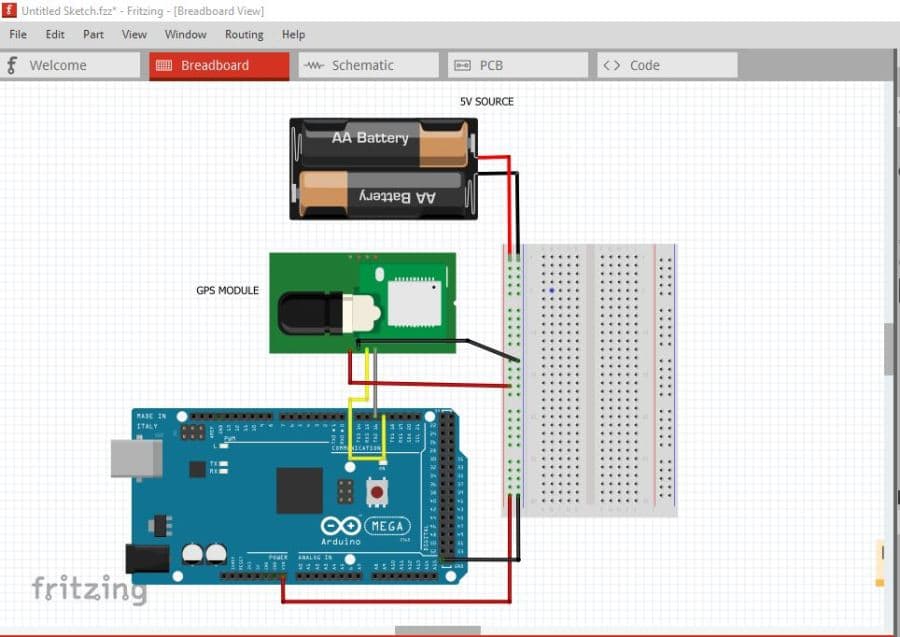
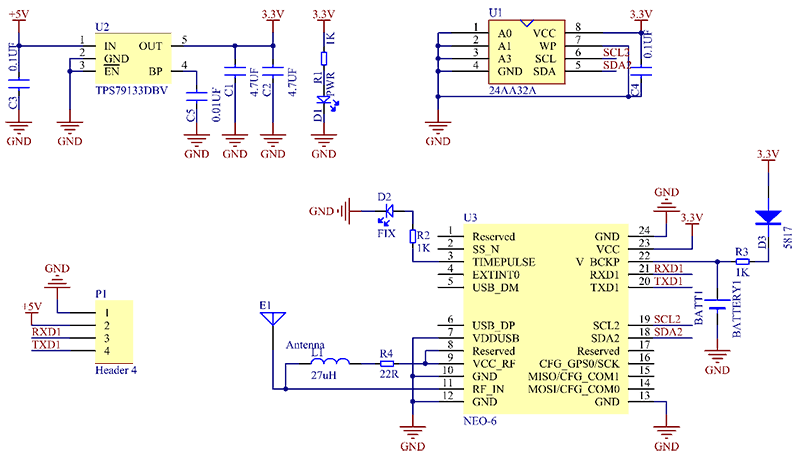
GPS RECEIVER
The GPS receiver provides the values of the latitude, longitude, date, & time. The biggest challenge with the GPS is the readings, which are inconsistent and works the best outdoors. The signals from the satellite , travelling at the speed of light, are intercepted by the GPS receiver.
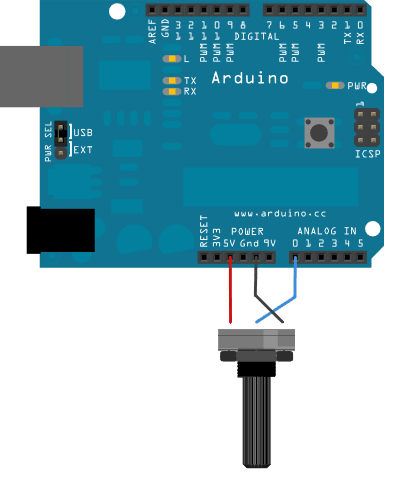
POTENTIOMETER
The potentiometer uses the analog pin and forms a range of 0 to 1023, which is proportional to the amount of voltage being applied to the pin. Turning the potentiometer acts like a switch, as dependent on where one turns the potentiometer, the RTPT will show a different planet.
SERVO
The servos allow the laser to point to the correct angle. The servos angles are dependent on the Azimuth-Altitude calculations derived through Kepler’s law. These calculations are used through the time and date.