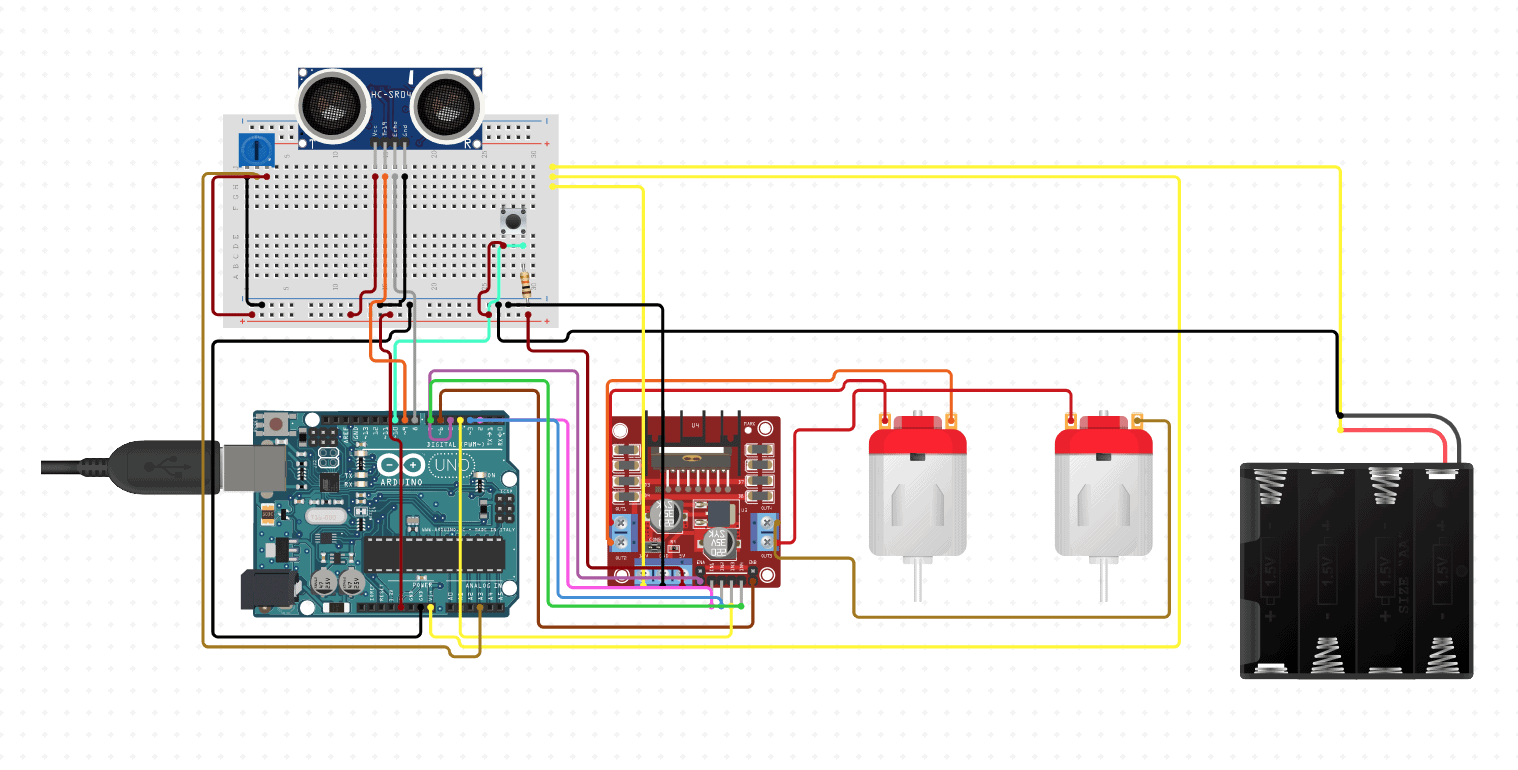
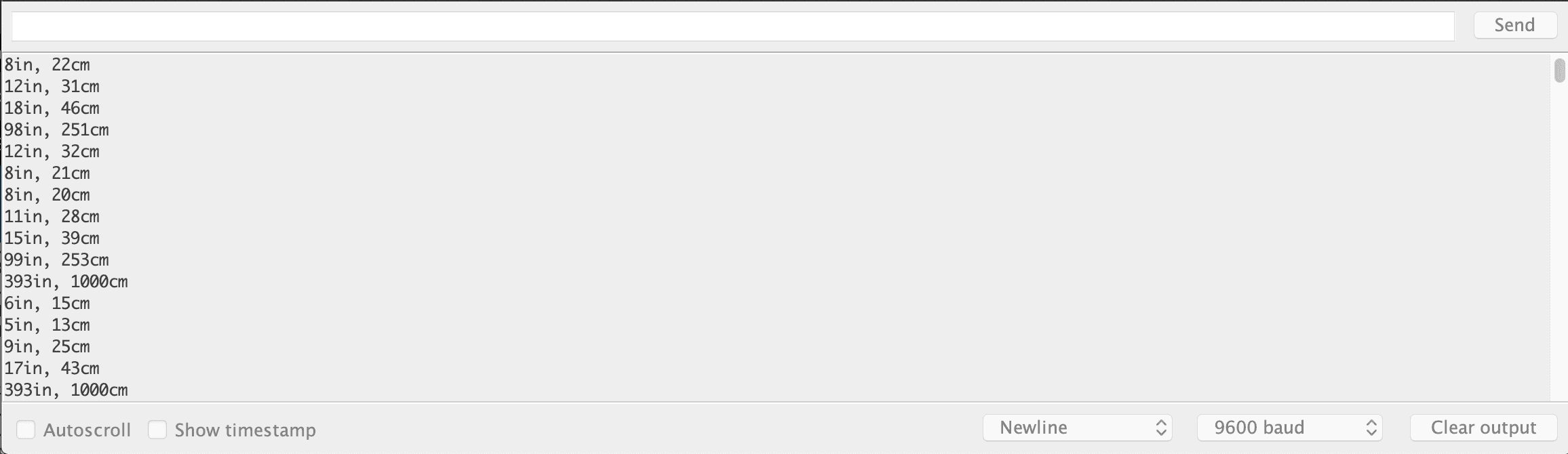
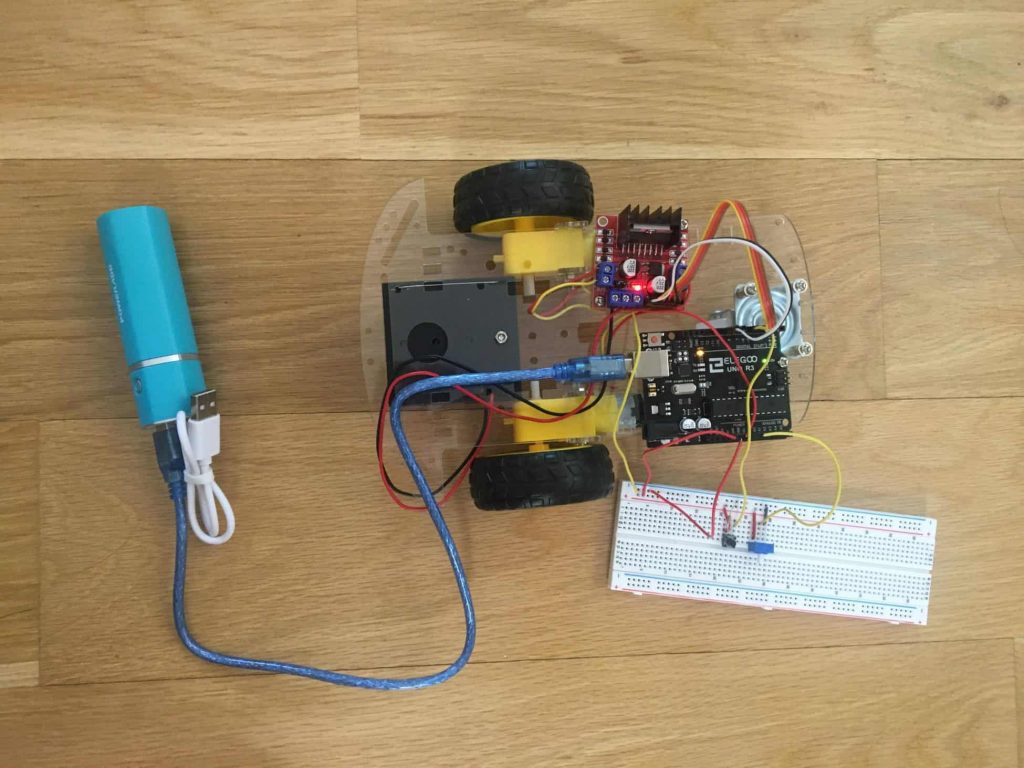
My final milestone consisted of mostly coding in which I made the two DC motors respond to the outputs of the HC-SR04 ultrasonic sensor. If the closest object is within 6 inches of the robot, the robot turns right; Otherwise it continues moving forward. I once again ran into problems of the ultrasonic sensor’s outputs not displaying properly and motors not spinning correctly, but I eventually fixed those problems. This was definitely the most difficult part of the whole project– not doing things the wrong way, but figuring out what I did wrong and how I should approach the solution to it. Some potential modifications I wish to include in my free time would be adding sensors on either side of the robot so it is able to determine which side to turn rather than always turning right as well as adding visual features like lights or cleaner wiring. Throughout this program, I was able to work with many things that I hadn’t worked with before like the Arduino and electrical engineering. This program has really been a memorable experience because it helped me explore some different fields of engineering that I wouldn’t have experienced otherwise. I was also able to work, with the help of a mentor, on a project that interested me because of the variety of concepts and skills it touched.