Robot Controlled Arm
This project is a robot arm that is controlled via your smartphone. It can complete simple tasks such as moving objects around and picking up items. You can control the robot using your phone and create custom movements for the robot to automatically follow.
| Engineer | School | Area of Interest | Grade |
|---|---|---|---|
|
Sundeep K. |
Dublin High School |
Computer Science |
Rising Senior |
FIRST MILESTONE
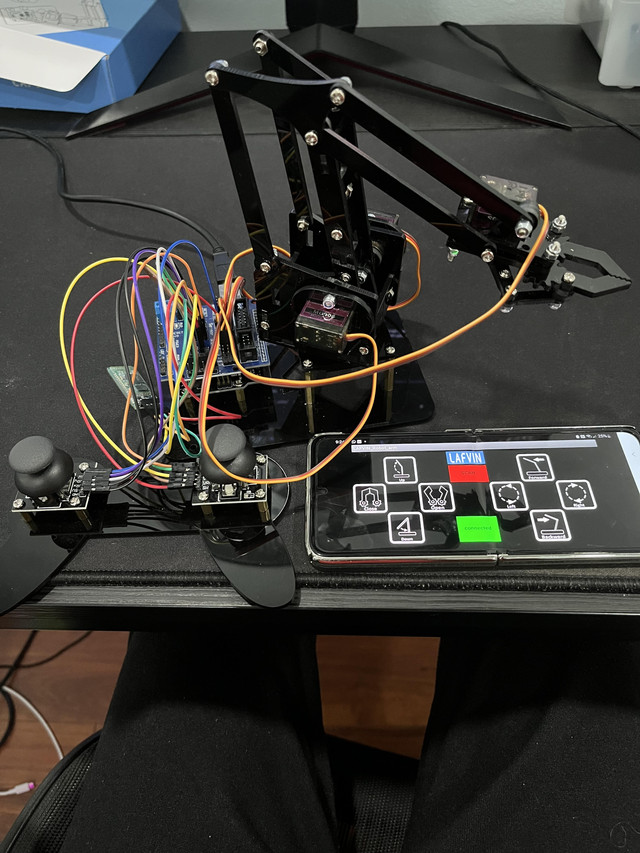
My final milestone for this project was to connect the mobile device and the robot. I managed to finish all the programming and paired it to my Android device through the HC05 bluetooth module. I ran into one major problems which was that an IOS device was unable to support the code so I had to use an Android in order for it to work properly. Once the code was connected properly, all the controls were working and the robot could move however I want it to. Additionally, I wanted to further add modifications to the project. I ended up connecting a PS2 controller with joystick sensors to the robotic arm. The controller used joysticks to move the robot and it did the same thing as the mobile app. I had to program a different file of code for the controller because it was different from the mobile app. An obstacle that appeared during milestone three was that one of my servos was screwed on too tight. This prevented the robot arm from going up and down. To fix this I had to dismantle some of the robot so I can loosen the servo. By the end of the milestone I had successfully completed the project and even added an extra modification.
My first milestone for this project was being able to understand the parts needed for my phone controlled robot arm and get a servo up and running. First I learned about the different parts that are essential for this robotic arm project. The main component being the Arduino Board, I learned its various functions and how to connect it to my laptop to be able to program on it. I then learned how to make an LED light up using the Arduino and a breadboard. Then I moved onto something more complicated and connected a servo to the Arduino board. This let me change the movement of the servo with any input that I desired. Some issues that I ran into were that my servo at first didn’t rotate and I fixed this by modifying the code and placing the jumper wires in the proper pin holes. In this first modification I also started to get my bluetooth connection working. My next steps are to be able to get a fully functional bluetooth connection and assemble the robot arm itself.
SECOND MILESTONE
My second milestone for this project was being able to fully complete building the physical portion of the robot. Additionally I also started the code to connect the bluetooth module to the robot. I first went through the tutorial of the instructions and managed to complete the robot with minimal difficulties. One major challenge that I ran into was that some pieces were breaking when I was installing them. Fortunately it wasn’t a huge issue because the parts were easily replaceable. But if an important piece were to break it would cause probelms so in the future I used less pressure when using different parts. After the robot was successfully built, I started to work on the code. At first the code was really complicated so it took time to get started on it. I ended up hooking up the bluetooth module to my computer and for my next steps I want to fully complete the code and pair it with the robot.
FINAL MILESTONE
My final milestone for this project was to connect the mobile device and the robot. I managed to finish all the programming and paired it to my Android device through the HC05 bluetooth module. I ran into one major problems which was that an IOS device was unable to support the code so I had to use an Android in order for it to work properly. Once the code was connected properly, all the controls were working and the robot could move however I want it to. Additionally, I wanted to further add modifications to the project. I ended up connecting a PS2 controller with joystick sensors to the robotic arm. The controller used joysticks to move the robot and it did the same thing as the mobile app. I had to program a different file of code for the controller because it was different from the mobile app. An obstacle that appeared during milestone three was that one of my servos was screwed on too tight. This prevented the robot arm from going up and down. To fix this I had to dismantle some of the robot so I can loosen the servo. By the end of the milestone I had successfully completed the project and even added an extra modification.