Smart Lamp with IoT Technology
A fully color-customizable smart light with sensors that detect environmental parameters using IoT technology.
| Engineer | School | Area of Interest | Grade |
|---|---|---|---|
|
Forrest L |
Monta Vista |
Computational Finance |
Incoming Senior |
REFLECTION
During my six weeks at Bluestamp Engineering, I learned a lot of skills that I never would have the opportunity to learn in a classroom setting, which include coding with the Arduino IDE, dremeling, soldering, and much more! Most importantly, I gained a newfound interest in mechatronic and electrical engineering, and hope to further pursue it by building passion projects in my free time.
As for my project, I plan to further add more features to my LCD fixture. I will add a button to the top of the box that will allow for me to call a new display screen to display on the LCD that has new widgets, such as customized stocks and calendar events.
FINAL MILESTONE + MODIFICATIONS
In my third and last milestone, I finished assembling my acrylic box, painting, dremeling, and drilling compartments and cutouts for each of my sensors. On top of that, I also hit my first milestone, which was to add an LCD fixture that displays customized text. I did some final testing and adjustments to a couple sensors, and actually realized that my temperature sensor was actually a DHT22, not the DHT11 I had originally thought it was!
The small obstacles I faced were mostly in regards to assembling the box without any wires snapping,which happened a couple times. To fix them, I hot glued my power and ground rails down onto my PCB, so they would be permanently attached to the PCB, and then resoldered wires, using heat shrink tubing to wrap exposed wire. I was also trained to dremel and drill into the acrylic, and learned how to execute LCD commands through Arduino JSON 6, as well as using NTP servers, plus getting live weather using openweathermap’s API.
The image on the left shows me while testing out my LCD when wired to the PCB. After testing out the LCD fixture, I assembled all the components together to finalize my project.
SECOND MILESTONE
In my second milestone, I successfully transferred all my wires and sensors to a PCB, which allowed for my project to be organized and compact. After transferring my sensors, I began cutting wires and placing them into the correct plated through holes. In the process, I connected my ESP8266 to Cayenne to check for any issues, but thankfully there weren’t any.
I only had to resolve small issues in my second milestone, and they were in regards to desoldering. The components and functions of all of my sensors have not changed from my first milestone, as what I accomplished did not involve any electrical or mechatronic engineering, just a transfer of parts. For my next and final milestone, I want to assemble my entire project into an acrylic container, then cut gaps for my sensors and light to come out of.
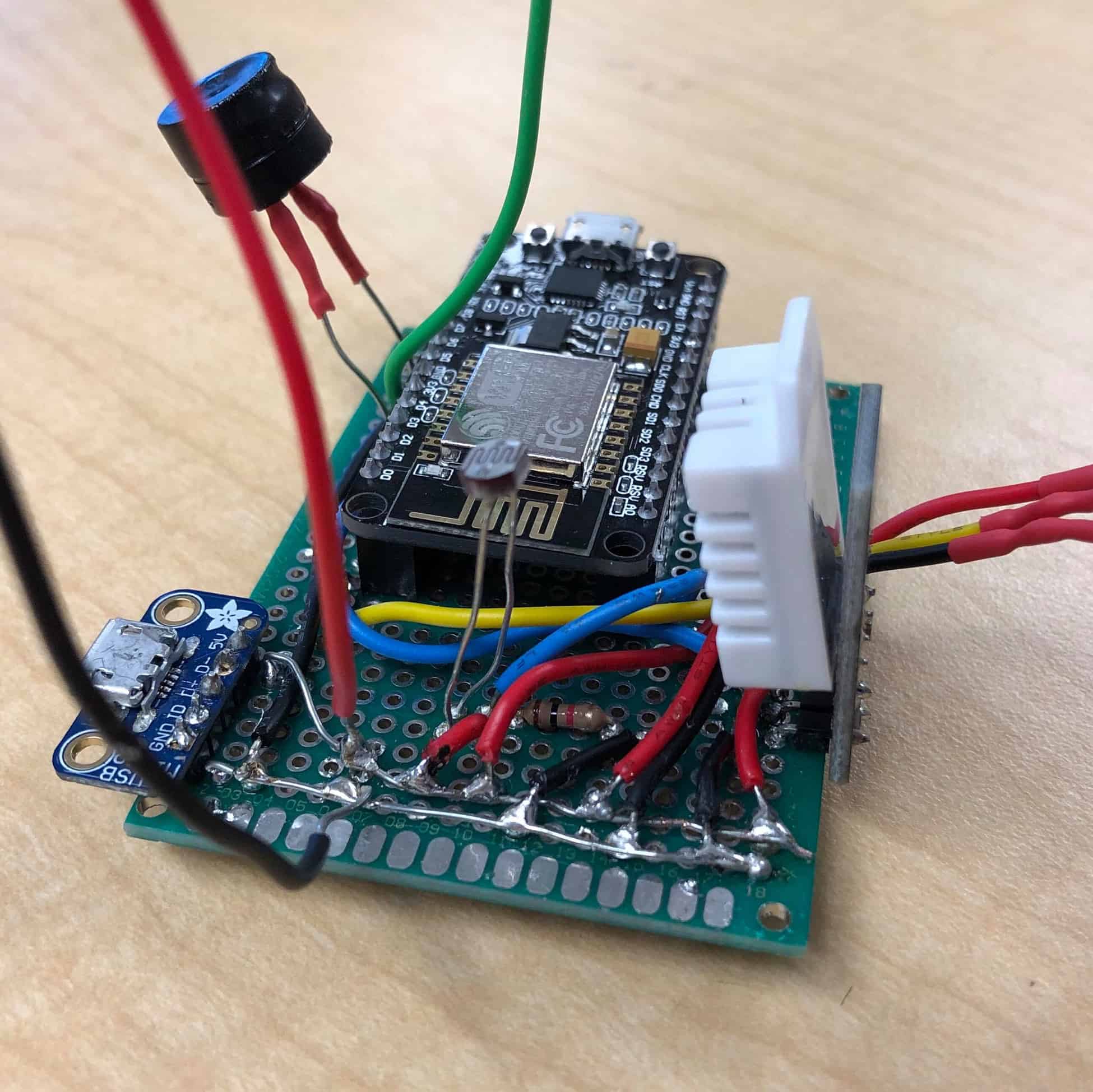
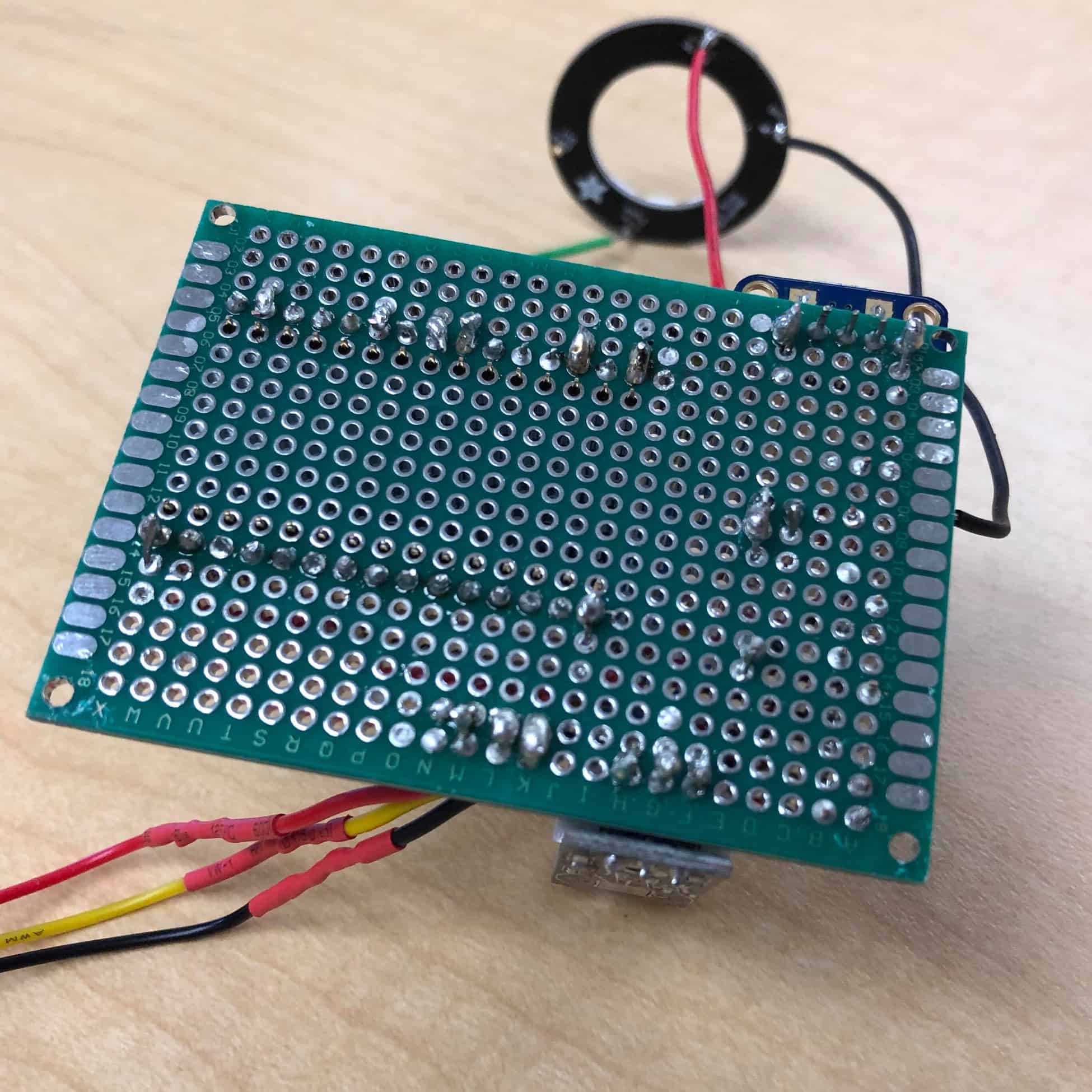
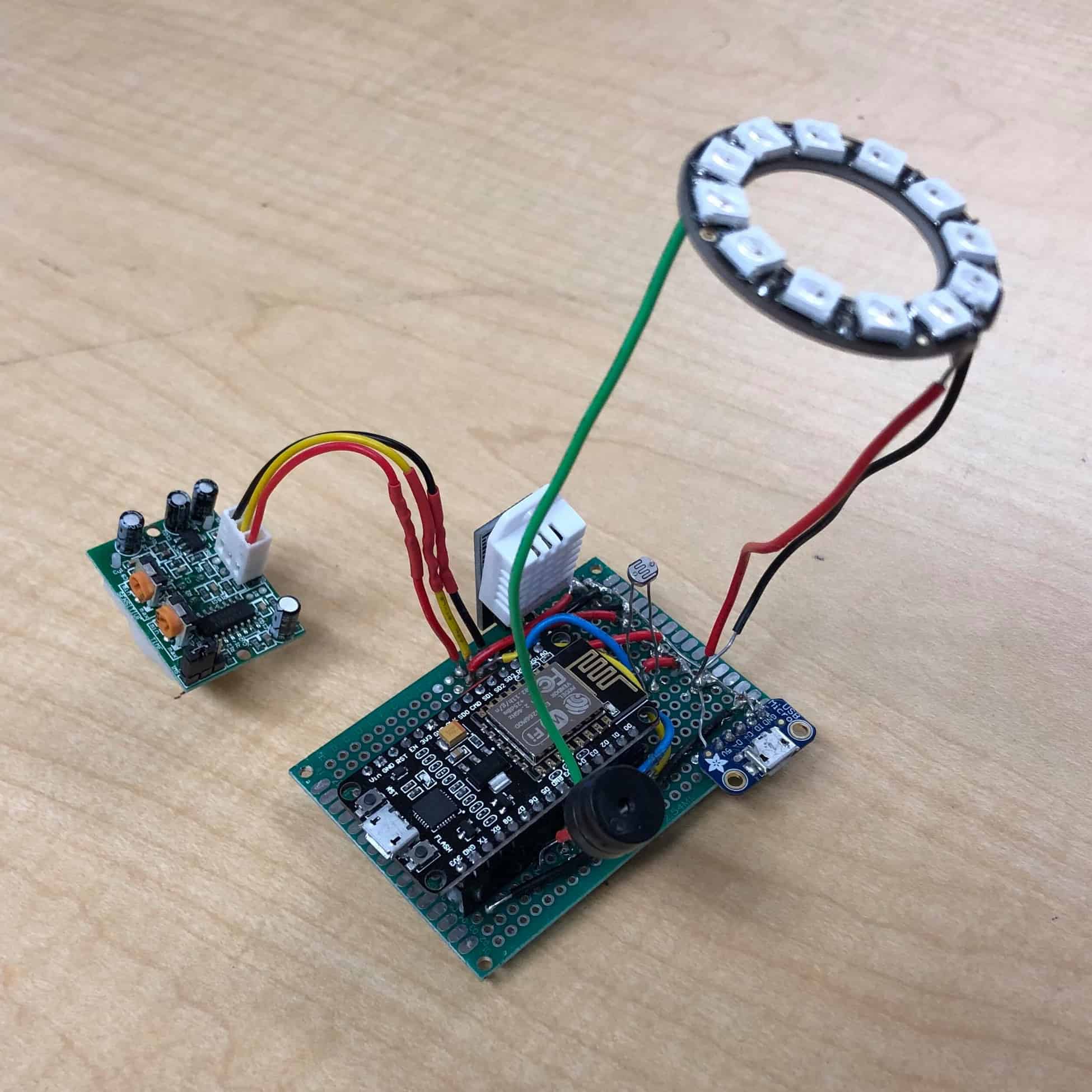
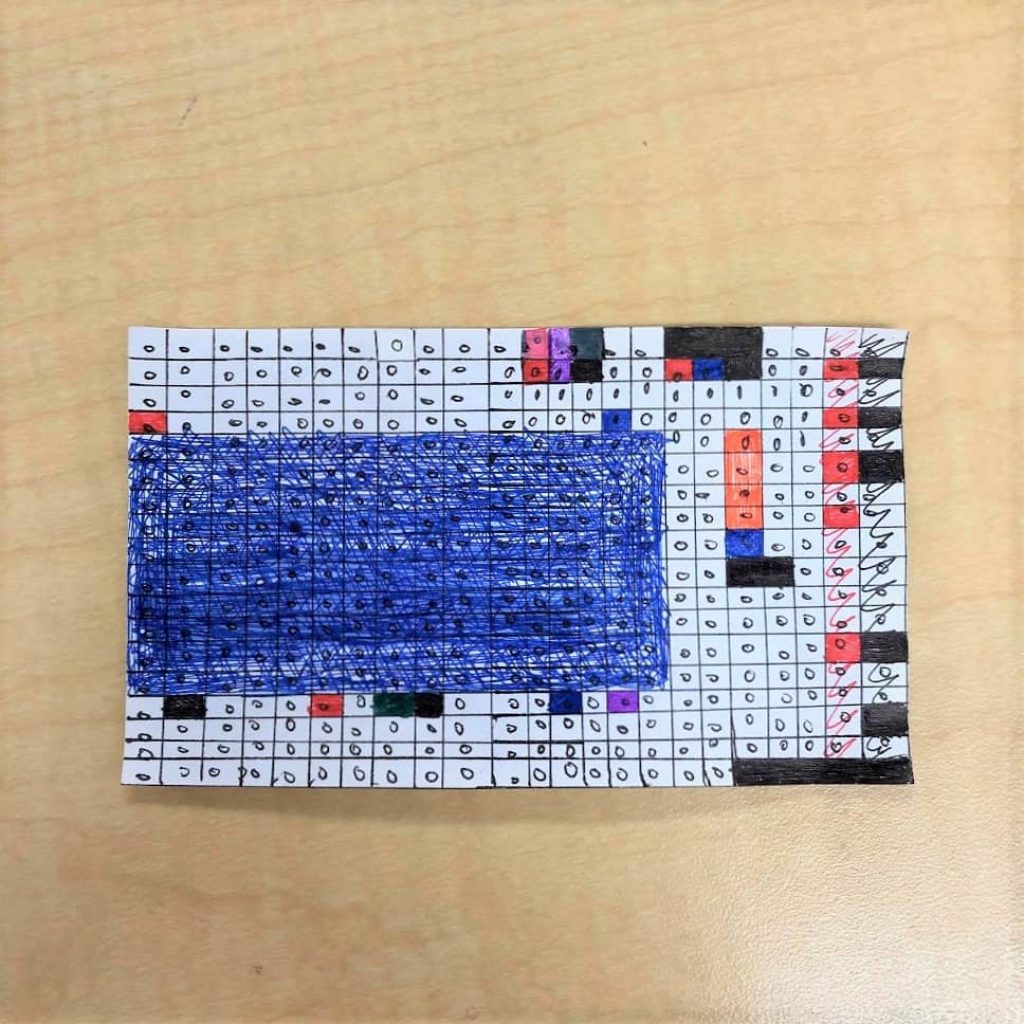
To the left, the first image is the wiring of my PCB, which is similar to my breadboard’s wiring, but more compact. The next image is of the backside of the PCB, and shows the solder bridges that I created to connect the wires to each other and the 5V and ground rails I created. The third image is a general overview of my project, with all components present, with the fourth being my hand-drawn schematic outline for my PCB, and lastly the digital schematic for my PCB.
FIRST MILESTONE
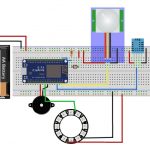
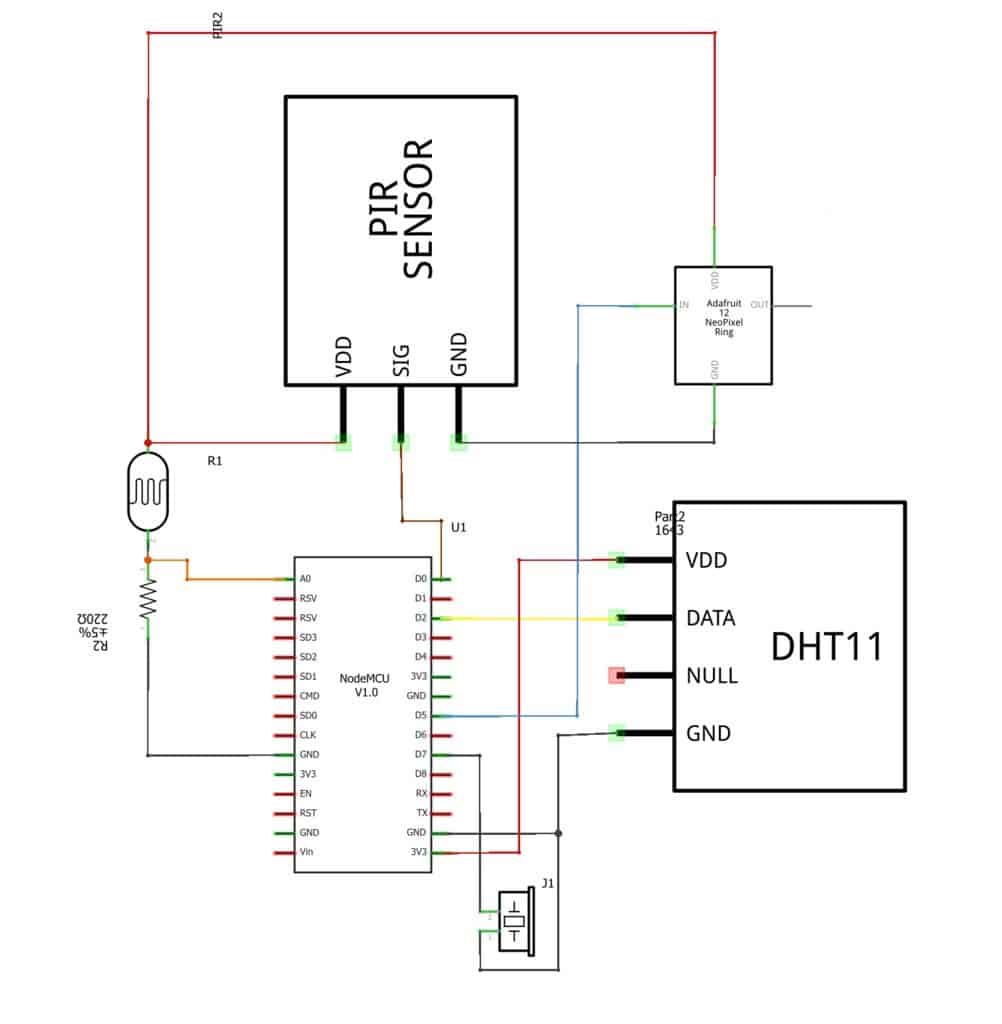
My first milestone consisted of assembling my sensors and wiring them onto my breadboard, then testing them all in my online IoT device platform, Cayenne. The neopixel ring turns on when the threshold of light captured through the photoresistor is below the amount set into code, and can be adjusted within the Cayenne dashboard, and the piezo buzzer turns on when motion is detected and reported into the dashboard from the PIR sensor (passive infrared sensor). The DHT22 keeps track of temperature and humidity data, returning the values to the ESP8266, and eventually the Cayenne dashboard. Lastly, the NodeMcu ESP8266 controls the entire breadboard through code from the virtual Arduino IDE and is powered through my USB breakout board.
I had many issues when initially building my main project, such as IDE library issues, IoT connection issues, and fried parts. My first issue was with the code, as the libraries wouldn’t upload into the Arduino IDE, and after some troubleshooting, I was able to resolve that by accessing Github repositories. Then came the connection issues with Cayenne, as my board was connected to my computer but could not access the virtual environment, which was resolved through using hotspot connections. I was also given the wrong power supply, 12V instead of a 5V, which fried my neopixel ring, as well as messed up the rails of my breadboard, which I had to replace.
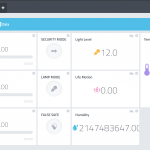
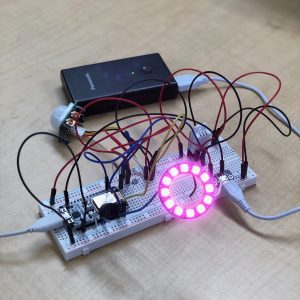
To the left, the first image i the schematic that I followed to wire my breadboard, and the second image shows the Cayenne environment that the ESP8266 accesses. The last three image shows my Neopixel ring displaying a pink color.